google在2017年paper《Attention Is All You Need》提出了transformer,我们可以看下:
摘要
目前主流的序列转换模型主要基于复杂的循环神经网络或卷积神经网络,这些模型通常包含编码器和解码器两部分。性能最佳的模型还通过注意力机制将编码器和解码器连接起来。我们提出了一种新的简单网络架构——Transformer,它完全基于注意力机制,摒弃了循环和卷积结构。在两个机器翻译任务上的实验表明,这些模型在质量上表现更优,同时具有更高的并行性,且训练时间显著减少。我们的模型在WMT 2014英语到德语翻译任务上取得了28.4的BLEU分数,比现有的最佳结果(包括集成模型)提高了超过2个BLEU分数。在WMT 2014英语到法语翻译任务上,我们的模型在8个GPU上训练了3.5天后,取得了41.0的BLEU分数,创下了新的单模型最佳成绩,而训练成本仅为文献中最佳模型的一小部分。
1.介绍
循环神经网络(RNN)、长短期记忆网络(LSTM)[12]以及门控循环神经网络(GRU)[7],尤其在序列建模和转换问题(如语言建模和机器翻译)中,已被确立为领先的技术手段[29, 2, 5]。随后,众多研究不断推进循环语言模型和编码器-解码器架构的边界[31, 21, 13]。循环模型通常沿着输入和输出序列的符号位置进行因子分解计算。将位置与计算时间的步骤对齐,它们生成一系列隐藏状态$h_t$,作为前一个隐藏状态$h_{t-1}$和位置$t$的输入的函数。这种固有的顺序性质阻碍了训练样本内的并行化,这在序列较长时变得尤为关键,因为内存限制限制了跨样本的批处理。最近的工作通过因子分解技巧[18]和条件计算[26]在计算效率上取得了显著提升,同时后者也提高了模型性能。然而,顺序计算的基本限制仍然存在。
注意力机制已成为各种任务中引人注目的序列建模和转换模型的一个组成部分,它允许建模依赖关系而不考虑它们在输入或输出序列中的距离[2, 16]。然而,在除少数情况外的所有情况下[22],这种注意力机制是与循环网络结合使用的。
在本研究中,我们提出了Transformer,这是一种摒弃循环结构而完全依赖注意力机制来捕捉输入和输出之间全局依赖关系的模型架构。Transformer允许显著更多的并行化,并且只需在八个P100 GPU上训练十二小时,就能在翻译质量上达到新的技术高峰。
2.背景
减少顺序计算的目标,也构成了Extended Neural GPU[20]、ByteNet[15]和ConvS2S[8]的基础,这些模型都使用卷积神经网络作为基本构建块,并行计算所有输入和输出位置的隐藏表示。在这些模型中,关联来自两个任意输入或输出位置的信号所需的操作次数随位置之间的距离增长,对于ConvS2S是线性增长,而对于ByteNet是对数增长。这使得学习远距离位置之间的依赖关系变得更加困难[11]。在Transformer中,这一操作次数被减少到一个常数,尽管由于对基于注意力加权位置(attention-weighted positions)进行平均而导致有效分辨率降低,但我们通过多头注意力机制(Multi-Head Attention)来抵消这种影响,详见第3.2节。
自注意力机制(Self-attention),有时也称为内部注意力机制(intra-attention),是一种将单个序列的不同位置关联起来以计算序列表示的注意力机制。自注意力机制已成功应用于多种任务,包括阅读理解、抽象摘要、文本蕴含以及学习任务无关的句子表示[4, 22, 23, 19]。
端到端记忆网络(End-to-end memory networks)基于循环注意力机制,而不是序列对齐的循环结构,已被证明在简单语言问答和语言建模任务中表现良好[28]。
然而,据我们所知,Transformer是第一个完全依赖自注意力机制来计算输入和输出表示的转换模型,而不使用序列对齐的RNN或卷积网络。在接下来的章节中,我们将描述Transformer的架构,探讨自注意力机制(self-attention)的动机,并讨论其相对于[14, 15]和[8]等模型的优势。
3.模型结构
大多数具有竞争力的神经序列转换模型都采用编码器-解码器结构[5, 2, 29]。在这种结构中,编码器将输入符号表示序列$(x_1, …, x_n)$映射为一个连续表示序列$z = (z_1, \cdots, z_n)$。在给定$z$的情况下,解码器逐步生成一个符号输出序列$(y_1, \cdots, y_m)$,每次生成一个元素。在每一步中,模型是自回归的[9],在生成下一个符号时,会将之前生成的符号作为额外输入。
Transformer遵循了这一整体架构,但在编码器-解码器(encoder-decoder)中使用了堆叠的自注意力机制和逐点全连接层(point-wise FC-layers),分别如图1的左半部分和右半部分所示。
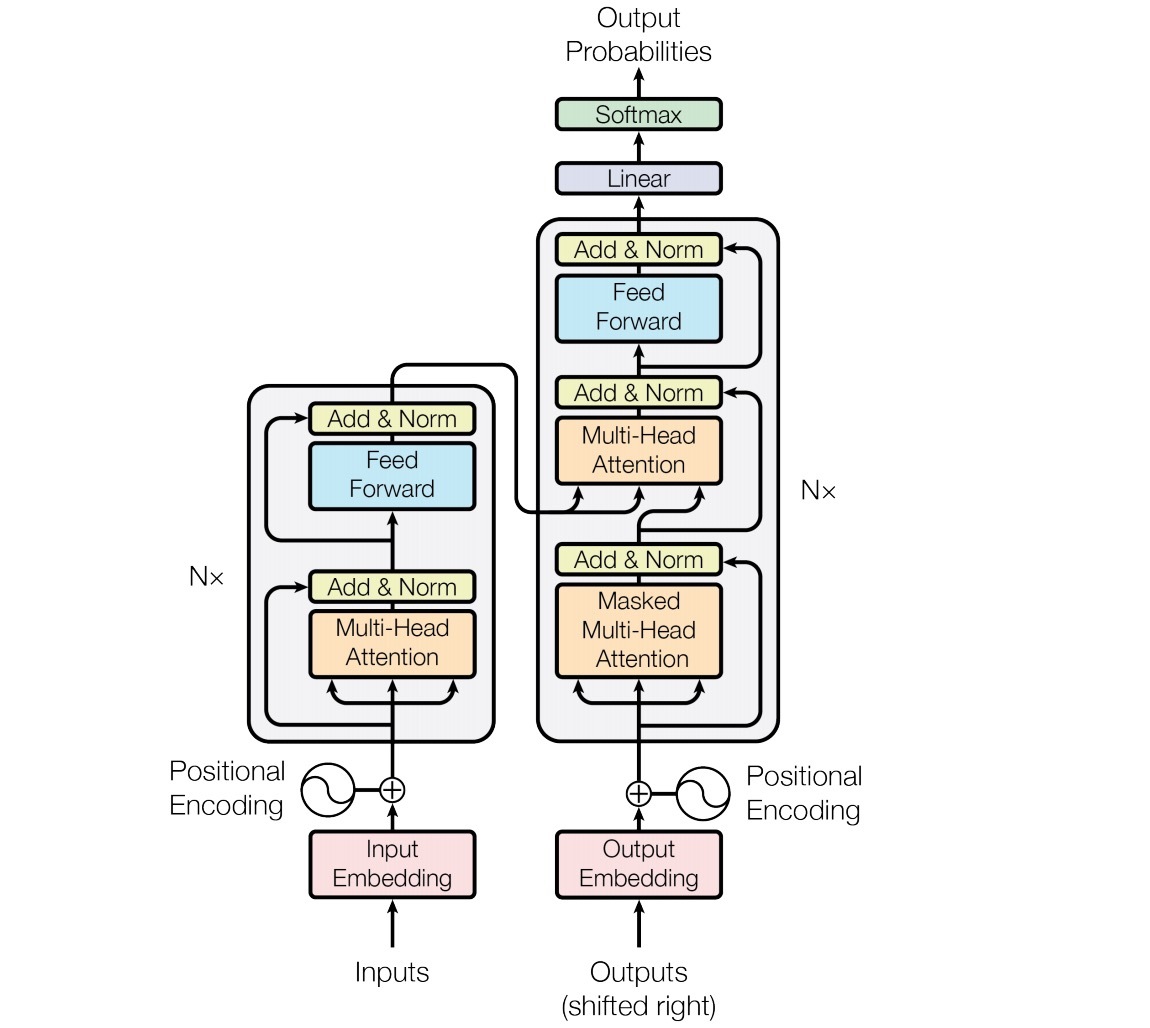
图1 Transformer模型结构
3.1 Encoder Stacks和Decoder Stacks
编码器:编码器由$N = 6$个相同的层堆叠而成。每一层包含两个子层:第一个是多头自注意力机制(MHA),第二个是简单的逐位置全连接前馈网络(position-wise FCN)。我们在每个子层周围使用了残差连接(residual connection)[10],并在其后进行层归一化(layer-normalization)[1]。也就是说,每个子层的输出为$\text{LayerNorm}(x + \text{Sublayer}(x))$,其中$\text{Sublayer}(x)$是子层自身实现的函数。为了支持这些残差连接,模型中的所有子层以及嵌入层的输出维度均为$d_{\text{model}} = 512$。
解码器:解码器同样由$N = 6$个相同的层堆叠而成。除了每一编码器层中的两个子层外,解码器还插入了一个第三子层:该子层对编码器堆栈的输出执行多头注意力机制(MHA)。与编码器类似,我们在每个子层周围使用了残差连接,并在其后进行层归一化。此外,我们对解码器堆栈中的自注意力子层进行了修改,以防止当前位置关注到后续位置。这种掩码机制结合输出嵌入向右偏移一个位置的事实,确保了位置$i$的预测只能依赖于位置小于$i$的已知输出。
3.2 Attention
注意力函数可以被描述为将一个查询(query)和一组键值对(key-value pairs)映射到一个输出(output),其中查询(Q)、键(K)、值(V)和输出(O)都是向量。输出是值的加权和,其中每个值的权重通过查询与相应键的兼容性函数计算得出。
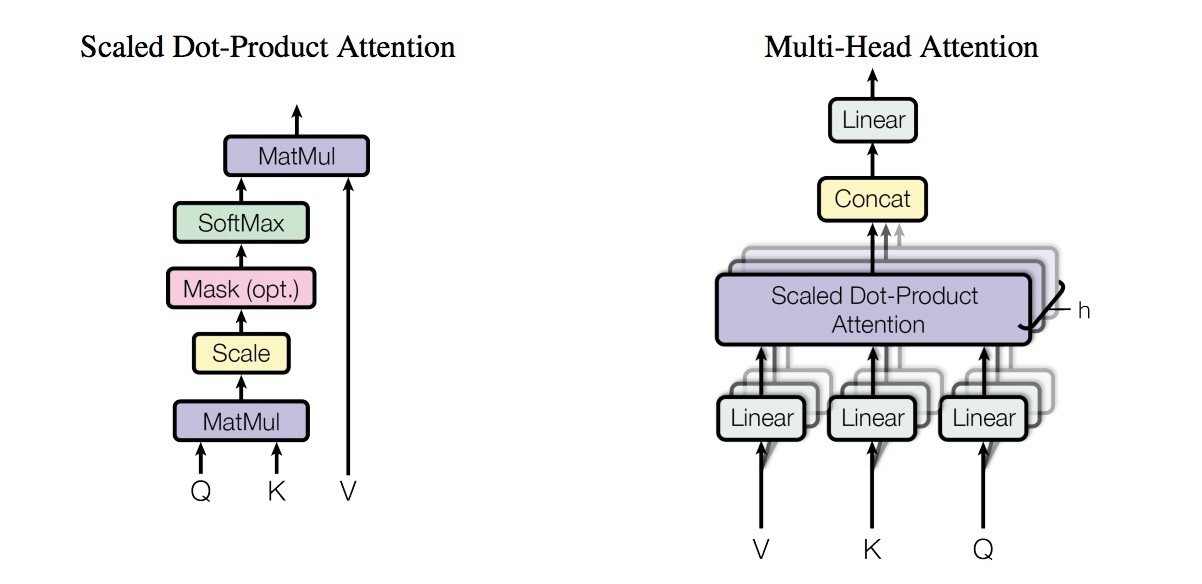
图2 (左) Scaled Dot-Product Attention (右) Multi-Head Attention,包含了并行运行的多个attention layers
3.2.1 归一化点乘Attention(Scaled Dot-Product Attention)
我们将这种特别的attention称为”Scaled Dot-Product Attention”(图2)。输入包含:querys、维度为\(d_k\)的keys、以及维度为\(d_v\)的values。我们会计算query和所有keys的点乘(dot products),每个点积都会除以\(\sqrt{d_k}\),并使用一个softmax函数来获取在values上的weights。
实际上,我们会同时在一个queries集合上计算attention函数,并将它们打包成一个矩阵Q。keys和values也一起被加包成矩阵K和V。我们会计算矩阵的outputs:
\[Attention(Q, K, V) = softmax(\frac{Q K^T}{ \sqrt{d_k}}) V\]…(1)
两种最常用的attention函数是:additive attention[2],dot-product(multiplicative) attention。dot-product attention等同于我们的算法,除了缩放因子\(\frac{1}{\sqrt{d_k}}\)。additive attention会使用一个单hidden layer的前馈网络来计算兼容函数。两者在理论复杂度上很相似,dot-product attention更快,空间效率更高,因为它使用高度优化的矩阵乘法代码来实现。
如果\(d_k\)值比较小,两种机制效果相似; 如果\(d_k\)值很大,additive attention效果要好于未经缩放的dot-product attention。我们怀疑:对于具有较大的\(d_k\)值,dot-product会更大,从而将softmax函数推到具有极小梯度值的区域上。为了消除该影响,我们将dot-product缩放至\(\frac{1}{\sqrt{d_k}}\)。
3.2.2 Multi-Head Attention
我们并没有使用单一的注意力函数来处理$d_{\text{model}}$维的键、值和查询,而是发现将查询、键和值分别通过不同的可学习线性投影进行$h$次线性投影到$d_k$、$d_k$和$d_v$维度更为有效。然后,我们在这些投影后的查询、键和值上并行执行注意力函数,生成$d_v$维的输出值。这些输出值被拼接起来并再次投影,最终得到输出结果,如图2所示。
多头注意力机制允许模型在不同位置同时关注来自不同表示子空间的信息。如果仅使用单一的注意力头,平均操作会抑制这种能力。
\[MultiHead(Q, K, V) = Concat(head_1, \cdots, head_h) W^O \\ head_i = Attention(Q W_i^Q, KW_i^K, V W_i^V)\]其中,投影的参数矩阵为:
- $W^Q_i \in \mathbb{R}^{d_{\text{model}} \times d_k}$
- $W^K_i \in \mathbb{R}^{d_{\text{model}} \times d_k}$
- $W^V_i \in \mathbb{R}^{d_{\text{model}} \times d_v}$
- $W^O \in \mathbb{R}^{h d_v \times d_{\text{model}}}$
在本研究中,我们采用了$h = 8$个并行的注意力层(即头)。对于每个头,我们使用$d_k = d_v = d_{\text{model}} / h = 64$。由于每个头的维度减少,总计算成本与全维度的单头注意力机制相似。
3.2.3 在模型中Attention的应用
Transformer在以下三种不同的场景中使用多头注意力机制(MHA):
-
- 编码器-解码器注意力层(encoder-decoder attention):查询(queries)来自解码器的前一层,而键(keys)和值(values)来自编码器的输出。这使得解码器中的每个位置都可以关注输入序列中的所有位置。这种机制模仿了序列到序列模型(如[31, 2, 8])中典型的编码器-解码器注意力机制。
-
- 编码器中的自注意力层:在自注意力层中,所有的键、值和查询都来自同一个地方,即编码器前一层的输出。编码器中的每个位置都可以关注编码器前一层的所有位置。
-
- 解码器中的自注意力层:类似地,解码器中的自注意力层允许解码器中的每个位置关注解码器中该位置及其之前的所有位置。为了防止信息从左向右流动以保持自回归特性,我们在缩放点积注意力中通过掩码(将非法连接对应的softmax输入设置为$-\infty$)来实现这一点。参见图2。
3.3 Position-wise前馈网络
除了attention sub-layers之外,在我们的encoder和decoder中的每一层,包含了一个FC前馈网络,它可以独自和等同地应用到每个position上。在两者间使用一个ReLU来包含两个线性转换。
\[FFN(x) = max(0, x W_1 + b_1) W_2 + b_2\]…(2)
其中:
- 线性转换在不同的positions上是相同的,在层与层间它们使用不同参数。
另一种方式是,使用kernel size为1的两个convolutions。输入和输出的维度是\(d_{model}=512\),inner-layer具有维度\(d_{ff}=2048\)。
3.4 Embedding和softmax
与其他序列转换模型类似,我们使用可学习的嵌入将输入标记和输出标记转换为维度为$d_{\text{model}}$的向量。我们还使用常见的可学习线性变换和softmax函数,将解码器输出转换为预测的下一个标记的概率。在我们的模型中,两个嵌入层和softmax前的线性变换共享相同的权重矩阵,类似于[24]的做法。在嵌入层中,我们将这些权重乘以$\sqrt{d_{\text{model}}}$。
3.5 Positional Encoding
由于我们的模型不包含循环(recurrence)和卷积(convolution),为了让模型利用序列的顺序,我们必须注入一些关于tokens在序列中的相对或绝对位置的信息。为此,我们在编码器(encoder)和解码器(decoder)栈底部添加“位置编码(positional encoding)”到input embedding中。该positional encodings与input embeddings具有相同的维度\(d_{model}\),因而两者可以求和。positinal encodings有许多选择,可以采用可学习(learned)或者固定(fixed)。
在本工作中,我们使用不同频率的sin和cosine函数:
\[PE_{(pos, 2i)} = sin(pos / 10000 ^{2i/d_{model}}) \\ PE_{(pos, 2i+1)} = cos(pos / 10000 ^{2i/d_{model}})\]其中:
- pos是position,i是维度
也就是说:positional encoding的每个维度对应于一个正弦曲线(sinusoid)。波长(wavelengths)形成了一个从\(2 \pi\)到\(10000 \cdot 2\pi\)的等比数列(也称几何级数:geometric progression)。我们选择该函数的原因是:假设它允许该模型可以很容易学到通过相对位置来进行关注(attend),因为对于任意固定offset k,\(PE_{pos+k}\)可以被表示成一个关于\(PE_{pos}\)的线性函数。
我们也使用学到的positional embeddings进行实验,发现两者版本几乎生成相同的结果(见表3 第E行)。我们选择正弦曲线版本,是因为它可以允许模型对序列长度长于训练期遇到的长度进行推导。
4.为什么用self-attention
在本节中,我们比较了self-attention layers与recurrent layers、convolutional layers的多个方面(它们常用于将一个变长序列的符号表示\((x_1, \cdots, x_n)\)映射到另一个等长的序列\((z_1, \cdots, z_n)\)上,其中:\(x_i, z_i \in R^d\)),比如:在一个常用的序列转换encoder或decoder中的一个hidden layer。启发我们使用self-attention主要有三方面考虑:
- 1.每一layer的总体计算复杂度
- 2.可以并行计算的计算量,通过所需序列操作(ops)的最小数目进行衡量
- 3.在长范围依赖(long-range dependencies)间的路径长度。学习长范围依赖在许多序列转换任务中是一个关键挑战。影响该能力(学习这样的依赖)一个的关键因素是,forward和backward信号的路径长度必须在网络中可穿越(traverse)。在input和output序列中任意位置组合间的路径越短,学习长范围依赖就越容易[11]。这里,我们也比较了由不同layer types构成的网络上,在任意两个input和output positions间最大路径长度。
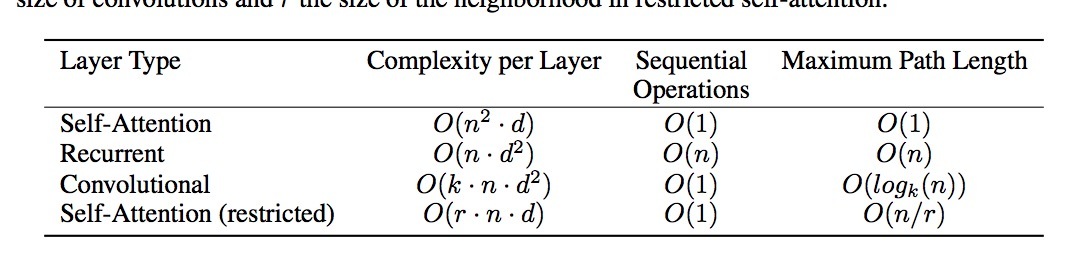
表1
如表1所示,一个self-attention layer会使用常数数目的序列执行操作(sequentially executed operations)来连接所有positions;而一个recurrent layer需要O(n)个序列操作(sequential operations)。根据计算复杂度,当序列长度n比representation维度d要小时(通常大多数情况下,使用state-of-art模型的句子表示,比如:word-piece和byte-pair表示),self-attention layers要比recurrent layers快。为了提升非常长序列任务的计算性能,self-attention可以限制到只考虑在input序列中围绕各自output position为中心的一个size=r的邻居。这可以将最大路径长度增大到\(O(n/r)\)。我们在未来会计划研究该方法。
kernel宽度\(k < n\)的单个convolutional layer,不会连接上input和output positions的所有pairs。在连续kernels的情况下,这样做需要一个\(O(n/k)个\) convolutional layers的stack;在扩大卷积(dilated convoluitons)的情况下需要\(O(log_k(n))\),这会增加在网络中任意两个positions间的最长路径的长度。卷积层(convolutional layers)通常要比recurrent layers开销更大,会乘以一个因子k。然而,可分离卷积(Separable convolutions),将复杂度减小到\(O(k \cdot n \cdot d + n \cdot d^2)\)。有了\(k=n\),然而,一个可分离卷积的复杂度等于一个self-attention layer和一个point-wise前馈layer,在我们的模型中采用该方法。
另一个好处是,self-attention可以生成更多可解释模型。我们从我们的模型中内省(inspect)出attention分布,并在附录部分讨论示例。单独的attention heads不仅可以很明确地学习执行不同的任务,出现在展示行为中的多个()还可以与句子的形态结构和语义结构相关。
5.训练
5.1 训练数据和Batching
我们在标准的WMT 2014 English-German dataset上进行训练,它包含了将近450w句子对(sentence pairs)。句子使用byte-pair encoding进行编码,它具有一个37000 tokens的共享的source-target词汇表。对于英译法,我们使用更大的WMT 2014-English-French数据集,它包含了36M句子,32000个word-piece词汇表。句子对(sentence pairs)通过近似的序列长度进行打包。每个training batch包含了一个句子对集合,它会近似包含25000个source tokens和25000个target tokens。
5.2 硬件与schedule
在8块nvidia P100 GPUs上进行模型训练。对于我们的base models,它使用paper上描述的超参数,每个training step会花费0.4s。我们会为base models训练10w个steps 或12小时。对于我们的大模型(表3底部描述),step time是1s。大模型会训练30000 steps(3.5天)。
5.3 Optimizer
我们使用Adam optimizer,\(\beta_1=0.9, \beta_2=0.98, \epsilon=10^{-9}\)。我们会根据训练过程调整learning rate,根据以下公式:
\[lrate = d_{model}^{-0.5} \cdot min(step\_num ^{-0.5}, step\_num \cdot warmup\_steps^{-1.5})\]…(3)
这对应于为前warmup_steps阶段线性增加learning rate,然后之后与step_num的平方根成比例减小。我们使用的warmup_steps=4000.
6.结果
6.1 机器翻译
在WMT 2014 English-to-German翻译任务上,big transformer model(见表2: Transformer(big))的效果要比之前最好的模型(包括ensembles)要好2.0 BLEU,达到一个新的state-of-art BLEU分:28.4. 该模型的配置列在了表3的底部。训练会在8张P100 GPUs上训练3.5天。我们的base model胜过之前发布的所有模型和ensembles,训练开销只是其他模型的一小部分。
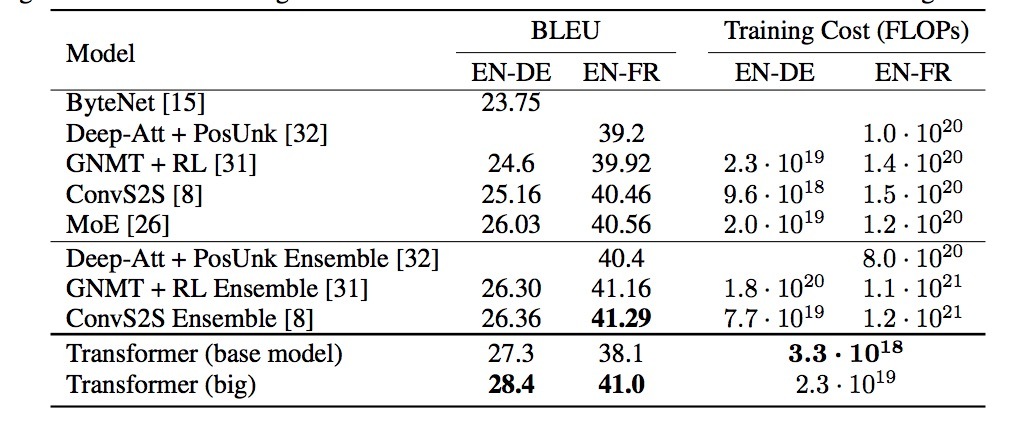
表2:
在WMT 2014 English-to-French翻译任务上,我们的big model的BLEU得分为41.0, 比之前发布的single models都要好,训练开销只有之前state-of-art model的1/4. 对于English-to-French所训练的Transformer(big)模型,使用dropout rate为:\(P_{drop}=0.1\),而非0.3。
对于base models,我们使用一个single model,它通过最后的5个checkpoint进行平均获得,每个checkpoint会有10分钟的时间间隔。对于big models,我们则对最后的20个checkpoints进行平均得到。我们使用的beam search的beam size为4, length penalty为 α = 0.6. 这些超参数会在实验之后选择。我们在推断(inference)期间设置最大的output length为: (input length+50),当可能时会提前终止。
表2归纳了我们的结果,并比较了与其它模型结构间的翻译质量和训练开销。我们估计了用于训练一个模型的浮点操作的数目,乘以训练时间,所使用的GPUs数目,以及每个GPU的持续的(sustained)单精度浮点能力(single-precision floating-point capacity)。
6.2 模型变种
为了评估Transformer中不同组件的重要性,我们以不同的方式区分我们的base model,并在数据集newstest2013上测量了在English-to-German翻译上的效果。我们使用前一节描述的beam serach,但没有进行checkpoint averaging。我们的结果在表3中。
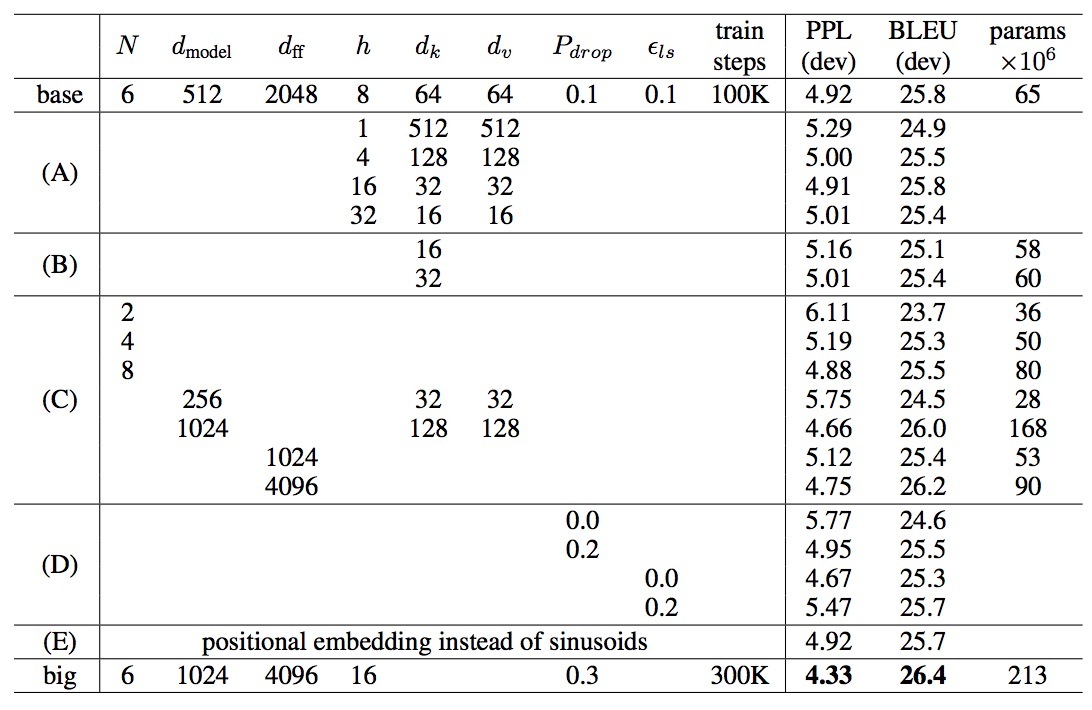
表3
在表3 rows(A),我们会使用不同的attention heads数目、attention key和value维度,来保持常数级的计算量,如3.2.2节所描述的。而single-head attention是0.9 BLEU,它比最佳setting要差,如果有太多heads质量也会下降。
在表3 rows(B),我们观察到减小attention key size \(d_k\)会伤害模型质量。这建议我们,决定兼容并不容易,一个dot-product更复杂的兼容函数可能会更有意义。进一步观察(C)和(D),模型越大越好,dropout在避免over-fitting上更有用。在row(E)上,我们使用已经学到的positional embedding[8]来替换了我们的sinusoidal positional encoding,结果与base model几乎相同。
7.结论
Transformer是首个完全基于attention的序列转换模型(sequence transduction model),它使用multi-headed self-attention来替换在encoder-decoder架构中常用的recurrent layers。
对于翻译任务,Transformer训练要比基于recurrent或convolutional layers的结构要快很多。在WMT 2014 English-to-German和WMT 2014 English-to-French翻译任务上,我们达到了一个新的state-of-the-art效果。
我们对attention-based模型的将来很激动,计划应用到其它任务上。我们计划将Transformer扩展到涉及输入输出形态的非文本问题,研究local, restricted attention mechanisms以有效处理大的inputs和outputs(比如:图片、音频、视频)。生成更少序列是另一个研究目标。
代码在:https://github.com/tensorflow/tensor2tensor